MEGA-D Megapixel Digital Stereo Head
![]()
 |
|
Sample Outdoor Images
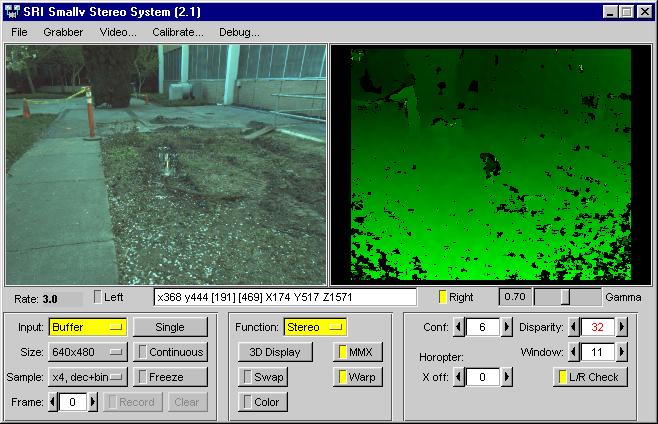
Sample color images from the MEGA-D, at 640x480 resolution. We took these pictures at SRI as part of the DARPA Perceptor project, for automatic guidance of an outdoor vehicle. Click on the image to see a larger format.
|
|
|
|
|
|
|
|
Color Images
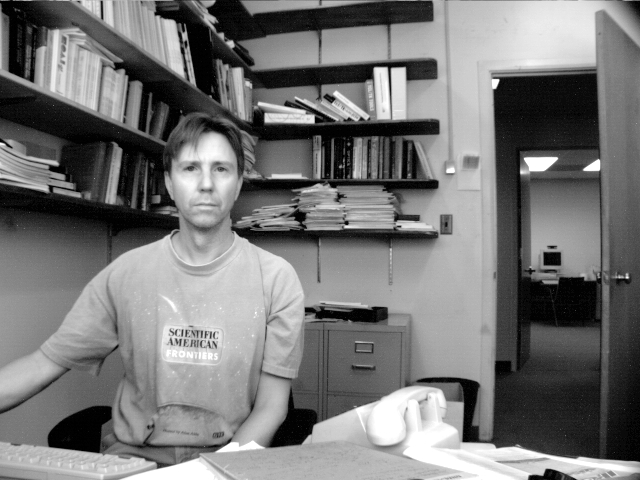
These are images from the STH-MD1-C. The PixelCam CMOS color imagers provide excellent color resolution, because the megapixel format means you can get true colors at each pixel of a 640x480 image without interpolation! Click on the image to see a larger format.
|
|
This image was taken using natural, indirect lighting. Note the fine color detail in the books at the bottom of the picture. The faithfulness of the color reproduction is very good here. |
|
|
This image was taken with indoor incandescent lighting. The tones are much warmer than the balloon image. In general, the color appearance of a scene will be affected by the type of ambient lighting present. |
Full-frame at different resolutions
|
|
|
|
|
|
1280x960 |
640x480, binned |
640x480, decimated |
320x240, bin+decimate |
Subwindowing
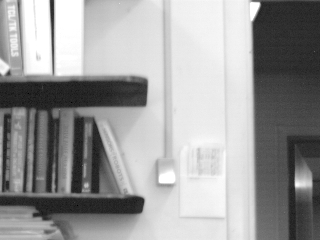
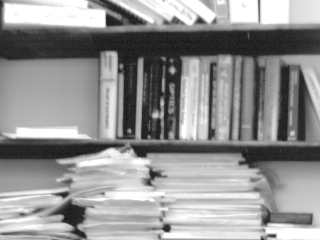
An arbitrary subwindow within the full frame can be returned, allowing for faster data transmission and realtime panning. Click on the thumbnails below to see a full-size image. The 640x480 subwindow is taken from the middle of the original 1280x960 image. The other three images are 320x240 subwindows taken at various points in the 1280x960 image.
|
|
|
|
|
|
640x480 subwindow |
320x240 subwindow |
320x240 subwindow |
320x240 subwindow |
One of the great things about subwindowing a large-format image is that you can perform electronic vergence. When an object is close to the cameras, and the cameras look "straight ahead," here's the image you get (320x240 subwindow):
|
|
|
There isn't a lot of overlap between the two images. The cameras need to be pointed to the subject, or "verged," in order to capture more of a common image. Here's the result:
|
|
|
Mechanical verging is difficult, requiring motors, control loops, and complicated design. It also changes the calibration of the cameras, so that they must be re-calibrated when the vergence is changed.
Electronic vergence is much simpler. The selected right and left subwindows are moved from a common offset, so that the right image is further right than it would normally be, and the left image is further left. This effectively forms a verged image pair, as above. Because the vergence is done on the image plane, no re-calibration is necessary, and the vergence can be done in real time. The Mega-D supports real time electronic vergence.