|
SRI International's Small Vision System is a Developer Kit for stereo applications. The SVS libraries can calibrate a stereo head, rectify the images to account for distortion, perform stereo correlation to compute a range image, and display the range image in OpenGL 3D form. |
Features: Efficient
Accurate
Flexible Simple, fast, accurate stereo head calibration using a printable planar target. You can change lenses, change baseline, even verge your cameras, and still calibrate them accurately. Lens distortion, all internal camera parameters, and external camera parameters are computed. Convenient
Affordable
|
SVS Kit Contents:
|
Requirements:
|
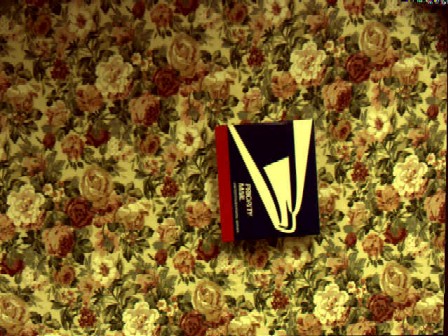
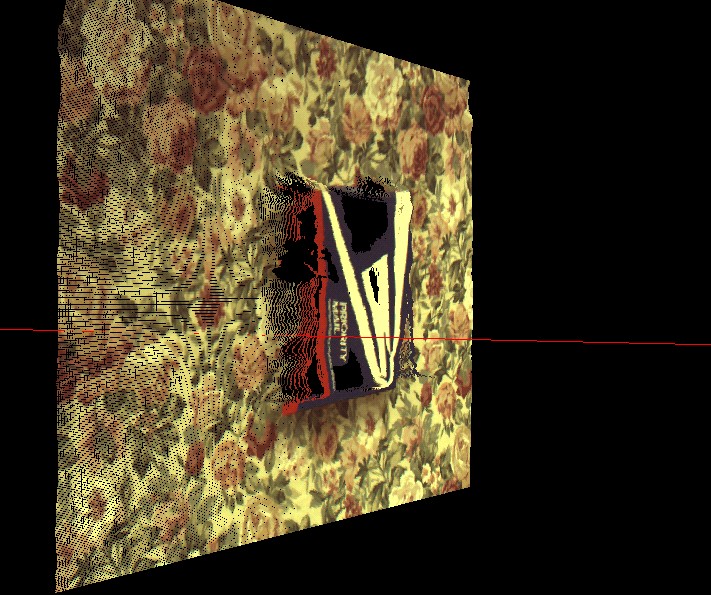
Accurate Range Results
This 640x480 color image, taken with a MEGA-D stereo head, shows the fine detail of the imagery. Below, the SVS system has converted the stereo pair into an accurate 3D point cloud. Click on the bottom image to view an animation of the point cloud. The red ray is the camera line-of-sight.
SVS was run in standard mode, with no post-processing of the disparity or 3D image, other than the standard texture and L/R filters.
|
|
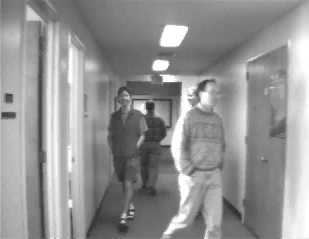
Realtime Performance
To fully appreciate the impact of full-motion stereo, you can download these quicktime movies, which show several people moving in a corridor -- click on the images to show the movie. The left-hand movie is the video image, the right is the stereo disparity image. The frame size is 320 x 240, with 24 disparities, at 15 fps.
|
|
|
XVision2 Interface
XVision2 is the newest version of the XVision system developed by Greg Hager, now at Johns Hopkins University. It is an open-source vision system, concentrating on realtime segmentation and tracking algorithms for video data. The new version incorporates and interface to SVS, enlarging its scope with realtime stereo input. XVision2 is a convenient way to experiment with new algorithms and applications using stereo.
XVision2 also has a MatLab interface to SVS data, so that the power of MatLab analysis can be brought to bear on your stereo data.
Relevant subdirectories for SVS users are:
src/Devices/matlab
src/Examples/showdisp
More Information: