
- Thunder Tiger .60 Size Trainer. 9lb 0.3 oz dry weight with GPS receiver, video transmitter, PDC-10, PDC-20, 1500 mAh Li-Ion battery for receiver and 3000 mAh Li-Ion battery for the video transmitter. Futaba R148DP PCM receiver.
- OS .70 four-cycle surpass engine. 12x8 APC propeller. Cruising speed: 40 mph. Top speed: 60mph. Stall speed: 25 mph. 60 min flight time.
- RC/video range - 2-3 miles
- Pitot tube (velocity pressure reading) intake is on the leading edge of the right wing.
Plane


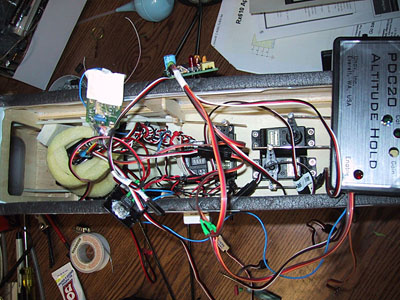
- Central bay view during assembly. The wires and electronics became a logistical nightmare to service. And the video/telemetry box is not even in the picture. I had to simplify...
Too many wires!
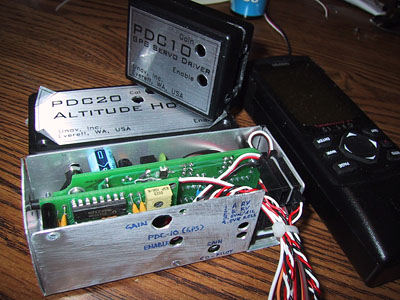
- PDC-10, PDC-20 and co-pilot are neatly packed into a custom aluminum box. The box slides under servo tray.
"Navigation box"
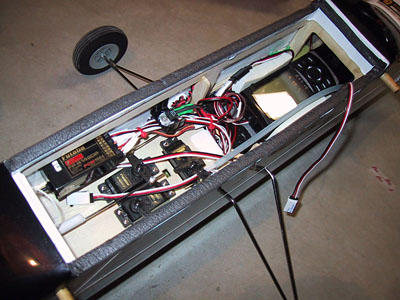
- GPS receiver sits on top of video/telemetry box
- Telemetry box is mounted with 3/4 inch of foam padding at the bottom of central bay.
- Futaba receiver is glued to the side of the fuselage
- One battery is on top of fuel tank another is between fuel tank and telemetry box
Central bay view

- co-pilot's sensor is mounted at the bottom in X configuration.
- 2.4 GHz turnstile antenna for omni radiation pattern.
Bottom view
Bottom view at the wing
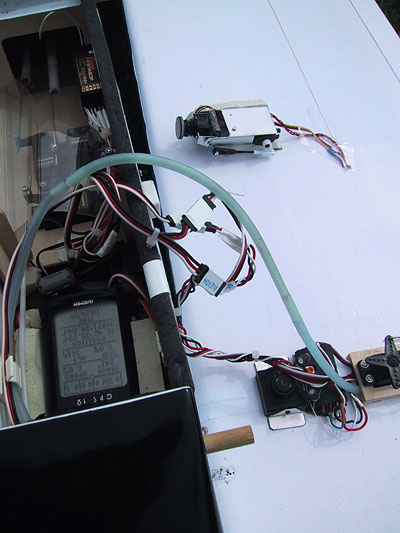
- Main camera is attached to a servo and can be tilted during flight.
- Pitot tube outlet, camera servo, aileron servo and video out cables are connected before wing is put in place.
- Second camera in the center of the wing observes GPS receiver screen during flight and reports altitude, ground speed and heading. This camera can be switched ON/OFF in flight.